Correcciones estáticas.
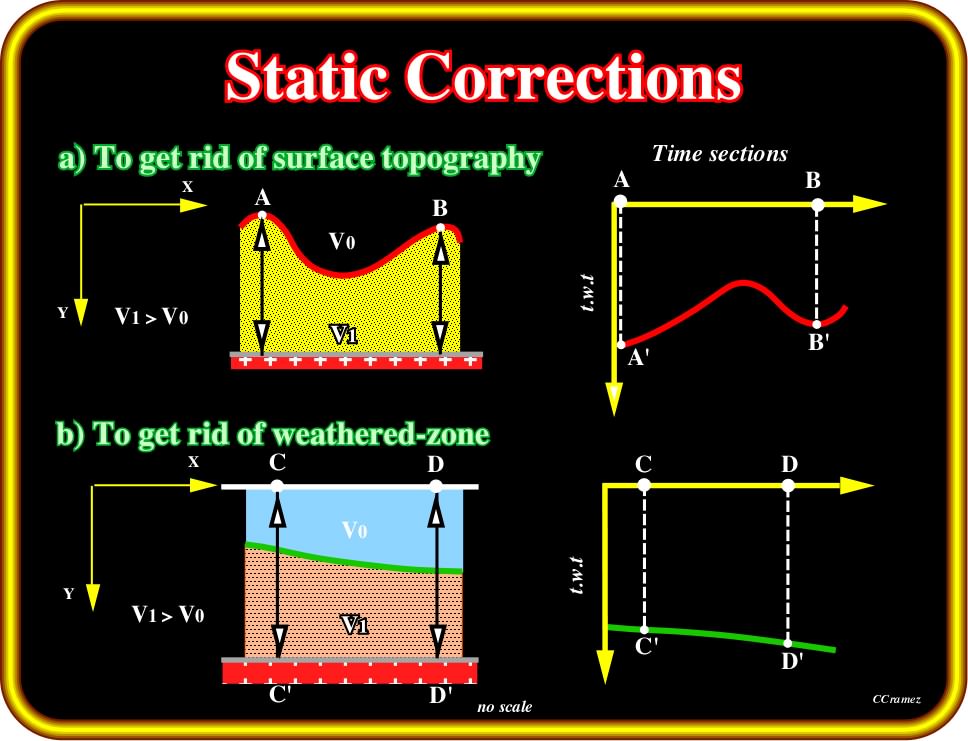 |
| En esta imagen se muestra un ejemplo ilustrativo del uso de las correcciones estáticas |
En esta segunda parte iniciamos con lo que son las correcciones estáticas, comúnmente llamadas simplemente estáticas, es por definición un cambio que se le hace a la traza sísmica en el tiempo durante el procesamiento sísmico. Una corrección estática común es la corrección de la capa de intemperismo, dicha corrección compensa por esta capa de materiales de baja velocidad sísmica y que se encuentra cercana a la superficie de la Tierra. Algunas otras correcciones compensan por diferencias en la topografía y diferencias en las elevaciones de las fuentes y los receptores. Existen varios métodos para realizar estas correcciones y aquí les mostraremos algunos de ellos:
 |
| Ilustración mostrando la diferencia entre los gather sin y con correcciones estáticas topográficas |
1. Método de elevación.- Para cada estación, hay una elevación medida. La diferencia entre las elevaciones ocasiona que un reflector horizontal parezca como curvo, así que se utiliza este método para mover todos los datos hacia arriba o hacia abajo al nivel del datum.
2. Método de boca de pozo.- Este método es usado para estimar el grosor y la velocidad de la capa de intemperismo. Este método involucra la perforación de un hoyo en dicha capa, hasta 100 metros, posteriormente se coloca un geófono cerca del hoyo y una fuente sísmica (usualmente dinamita) se pone dentro del hoyo. Este geófono graba las ondas sísmicas en cada profundidad, las cuales se grafican en una curva tiempo-profundidad, de la cual se pueden estimar el grosor y la velocidad de la capa de intemperismo.
3. Método de refracción.- El propósito de las estáticas de refracción es calcular las correcciones estáticas de la capa de meteorización durante el procesamiento de datos sísmicos de reflexión al usar el tiempo de viaje de energía sísmica críticamente refractada (primeros arribos).



 |
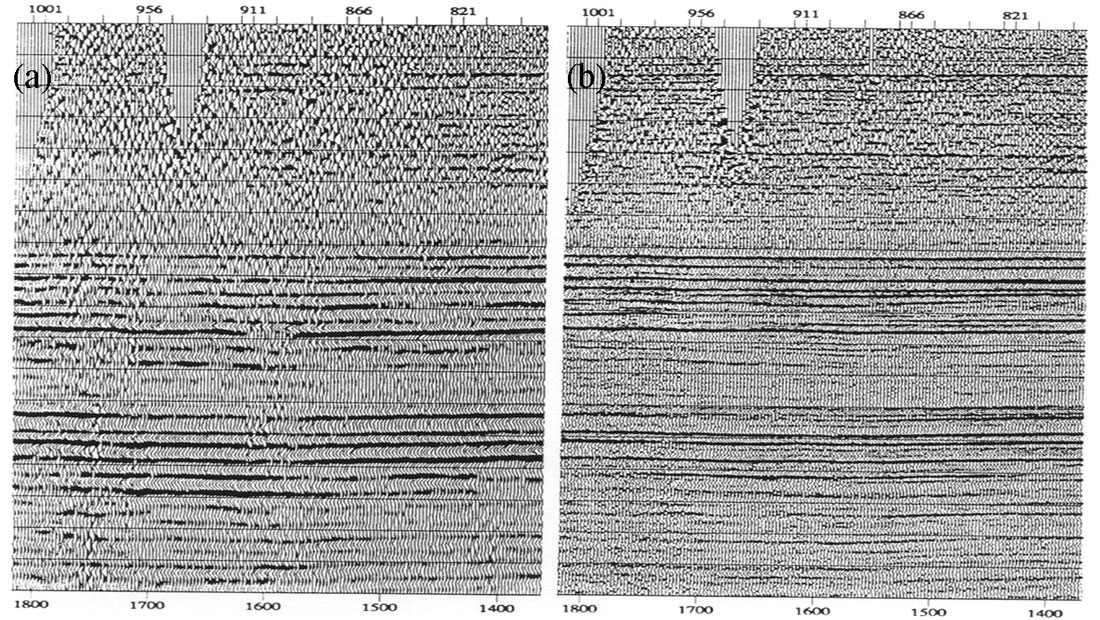
| Todas las imágenes anteriores muestran diferencias entre imágenes sísmicas con correcciones estáticas, algunas de diferente tipo, y como se comparan entre ellas |
Gathers CDP y apilamiento.
Punto común de profundidad se define como la suma de las trazas las cuales corresponden a un mismo punto de reflejo de una superficie del subsuelo pero tienen diferentes distancias de offset.
En este paso, juntamos estas trazas CDP y entonces las integramos todas como una sola traza (apilamiento).
La principal razón para usar el método de CDP es para mejorar la relación señal-ruido de los datos porque cuando una traza es sumada, las señales pueden crecer mientras que los ruidos aleatorios pueden cancelarse. Antes de apilar, las trazas deben ser movidas a su posición original por el sobretiempo normal por distancia (NMO).
 |
| El uso del método CDP se explica en la imagen ya que para los reflectores inclinados el método CMP causa resultados erróneos |
Sobretiempo normal por distancia o Normal Moveout (NMO).
El efecto de la separación entre fuente y receptores al tiempo de arribo de una reflexión que no tiene buzamiento. Una reflexión normalmente llega primero al receptor más cercano a la fuente. El offset entre la fuente y otros receptores induce a un retraso en el tiempo de arribo de una reflexión de una superficie horizontal a una cierta profundidad. Un gráfico de tiempos de arribo contra distancia de separación (offset) tiene una forma hiperbólica. La corrección se realiza en tiempo y se aplica a cada offset.
 |
| Efecto del NMO y el mute en un gather |
Análisis de velocidad.
La determinación de la velocidad sísmica es la clave para el uso del método sísmico y para llevarlo a cabo de la mejor manera, se necesita un mejor procesamiento de datos. Un apilamiento exitoso, una buena migración en tiempo y profundidad, todo requiere de los debidos insumos de velocidad. La estimación de la velocidad también es útil para la conversión de una sección en tiempo a profundidad.
Tipos de velocidad:
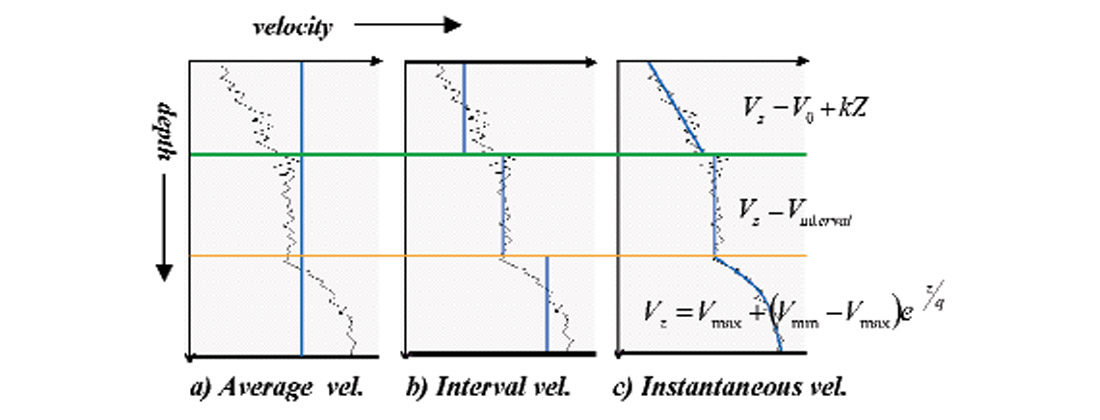
Velocidad instantánea.- Es la velocidad en cualquier momento dado de un frente de onda en la dirección de la energía de propagación (perpendicular al frente de onda). Este término es ocasionalmente usado para la velocidad determinada de los registros sísmicos de impedancia acústica.
Velocidad aparente.- La velocidad aparente de una fase dada en una dirección particular, usualmente la dirección de propagación del geófono en el ángulo theta a la dirección de la onda:

Velocidad promedio.- Es la relación de la distancia a través de cierto trayecto con el tiempo para atravesar el trayecto:


Una velocidad promedio podría considerarse pesudo velocidad si proviene el tiempo de la sísmica y la profundidad del pozo, y velocidad verdadera cuando se mide por un VSP, sónico o núcleo.
Velocidad media cuadrática o RMS.- Se refiere también a una trayectoria específica, asumiendo capaz horizontales,

Las velocidades RMS son típicamente un porcentaje mayores que las correspondientes velocidades promedio.


Velocidad de apilamiento.- El valor de la velocidad determinado por el análisis de velocidad que es usado para el apilamiento de punto medio común. En el límite donde el offset se acerca a cero, se aproxima a la velocidad NMO. La diferencia entre la velocidad de apilamiento y la de NMO es a veces llamada sesgo diferencial de longitud (Hubral y Krey, 1980)
Velocidad de intervalo.- Es la velocidad promedio en un intervalo de un trayecto. Comúnmente aproximada por la velocidad DIx. También es usada para la velocidad promedio calculada de los registros sónicos y aquella calculada de los surveys de pozo para los intervalos entre mediciones.

Velocidad DIx (Dix, 1995).- Aproxima la velocidad de intervalo para viajes verticales entre reflectores horizontales.

donde Vn es la velocidad RMS y tn is el tiempo de arribo cero-offset para la enésima reflexión. Esta ecuación produce valores ficticios si ambos reflectores no son horizontales si hay variaciones laterales de velocidad entre o arriba de ellos, o si el intervalo es grande.
Migración
Es el paso en el procesado de datos sísmicos en el cual las reflexiones en los datos sísmicos son movidas a sus posiciones correctas en el espacio x-y-tiempo de los datos sísmicos, incluyendo tiempo de viaje doble y posición relativa a los puntos de tiro. La migración mejora la interpretación sísmica y el mapeo porque la localización de estructuras geológicas, especialmente las fallas, son más exactas en secciones migradas. La migración intenta lidiar con difracciones e interfaces buzantes.
 |
| La migración se encarga de llevar los eventos a su posición correcta en el espacio |
Tipos de migración.
Migración en tiempo.- Es una técnica de migración para el procesamiento de datos sísmicos en áreas donde los cambios laterales de velocidad no son muy severos, pero las estructuras son complejas. La migración en tiempo tiene el efecto de mover eventos buzantes en una línea sísmica en superficie desde ubicaciones aparentes a sus verdaderas ubicaciones en tiempo.
Migración en profundidad.- Es un paso en el procesado de datos sísmicos en donde las reflexiones son movidas a sus ubicaciones correctas en el espacio, incluyendo la posición relativa a los puntos de tiro, en áreas donde hay cambios laterales significantes y rápidos o cambios verticales de velocidad que distorsionan la imagen en tiempo. Esto requiere un conocimiento preciso de las variaciones horizontales y verticales de velocidad sísmica.
La migración en profundidad pre-apilamiento es aquella que como su nombre indica, ocurre antes del apilamiento. Lo mismo es válido para la migración en profundidad post-apilamiento, que se realiza después de apilar los datos.
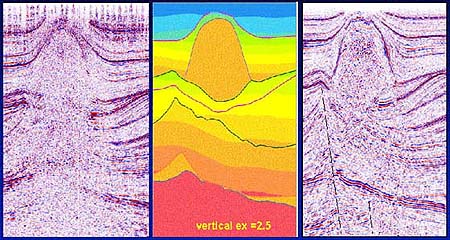 |
| Comparativa de una migración post-apilamiento en tiempo (izq.) y una migración pre-apilamiento en profundidad (der.), el modelo en el centro. |
Procesamiento post-apilado.
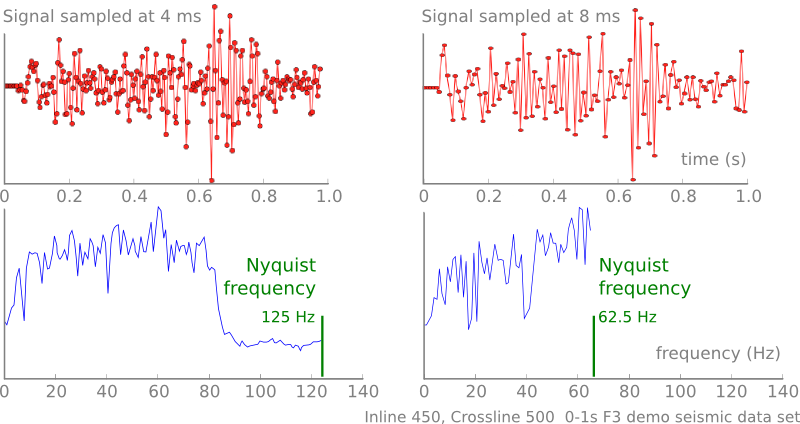
- Re-muestreo
- Interpolación (estima trazas sintéticas entre dos trazas reales)
- Control automático de ganancia y balanceo de trazas
-Mezcla de trazas (para controlar la ganancia como en el AGC pero lateralmente, de una traza a otra)
Por el momento es todo lo que hablaremos sobre procesado sísmico, en un futuro se podrían tratar los temas individualmente y más a fondo. En el siguiente post empezaremos con la interpretación de datos sísmicos.
Referencias-